-
-
-
Tổng tiền thanh toán:
-

BIẾN TẦN VÀ 10 LÝ DO SỬ DỤNG BIẾN TẦN (Phần II)
Ngày 19/03/2024
Bình luận (0)
BIẾN TẦN VÀ 10 LÝ DO SỬ DỤNG BIẾN TẦN (Phần II)
Lý do sử dụng biến tần
BIẾN TẦN SUMO 500
Biến tần Schneider
Đây là phần hai của loạt bài gồm hai phần về các biến tần. Trong Phần I, chúng tôi đã thảo luận cách biến tần thích hợp có thể giảm tiêu thụ năng lượng, cải thiện điều khiển thời gian thực và kéo dài tuổi thọ của động cơ. ( http://nihaco.com.vn/bien-tan-va-10-ly-do-ung-dung )
6.Chọn chế độ điều khiển thích hợp
Lựa chọn chế độ điều khiển biến tần phụ thuộc rất lớn vào ứng dụng. Ba chế độ điều khiển biến tần là volts-per-Hertz (V / Hz), vector không cảm biến (đôi khi được gọi là vector vòng lặp mở) và vòng lặp kín.
Các biến tần V / Hz sử dụng tỷ lệ giữa điện áp và tần số để phát triển dòng vận hành để cung cấp mô-men xoắn vận hành cho động cơ. Biến tần không có sensorless-vector có điều khiển mô-men xoắn chính xác trên một phạm vi tốc độ rộng mà không cần phải sử dụng phản hồi bộ mã hóa. biến tần vòng kín sử dụng phản hồi bộ mã hóa để thu được thông tin trượt và tốc độ động cơ.
Điều khiển V / Hz phù hợp cho nhiều ứng dụng như quạt và máy bơm. Tuy nhiên, đối với các ứng dụng đòi hỏi mức độ điều chỉnh tốc độ lớn hơn, vector cảm biến hoặc các loại điều khiển vòng kín có thể cần thiết. Các ứng dụng như nhà máy giấy, máy in ấn web, hoặc chuyển đổi vật liệu đòi hỏi quy định tốc độ bổ sung mà điều khiển vòng kín cung cấp. 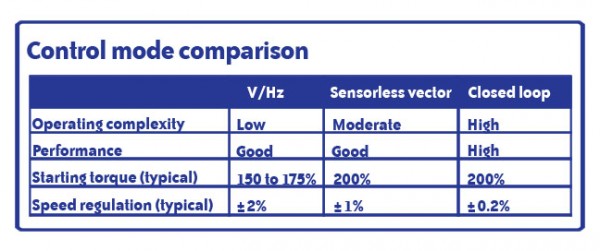
7.Hiểu thông số bạn muốn điều khiển
Việc chọn các cấu hình điều khiển biến tần thích hợp là rất quan trọng và phụ thuộc rất lớn vào ứng dụng. Kiểm soát các cấu hình để xem xét bao gồm tăng tốc, giảm tốc, tuyến tính dốc, điều khiển mô-men xoắn, phanh và PID. Hầu hết các thông số này có sẵn trên hầu hết mọi loại biến tần trên thị trường, nhưng PID có thể không được cung cấp trên các mô hình rất cơ bản.
Các thông số này có thể lập trình và có thể được lựa chọn bằng bàn phím vận hành hoặc thông tin số. Hiểu được các tham số này (và cách chúng ảnh hưởng đến sự tích hợp của biến tần vào quá trình) là bắt buộc; hướng dẫn sử dụng biến tần thường cung cấp các thông tin cần thiết để lựa chọn và lập trình các hồ sơ điều khiển phù hợp.
8.Biết các tùy chọn giao tiếp
Nhiều VFD có một hoặc nhiều giao diện truyền thông kỹ thuật số tích hợp sẵn. Ngay cả những mô hình kinh tế nhất thường bao gồm một giao diện nối tiếp như kết nối Modbus RS-232 / RS-485. Ethernet và truyền thông fieldbus là các tùy chọn được cung cấp với nhiều biến tần.
Một giao diện truyền thông kỹ thuật số có thể được sử dụng để kết nối VFD với các thiết bị khác có thể hoạt động như một thiết bị chủ như một bộ điều khiển dựa trên PLC hoặc PC. Thiết bị chính có thể điều khiển VFD bằng giao diện này thay vì sử dụng I / O rời rạc và tương tự. Master cũng có thể sử dụng giao diện này để theo dõi trạng thái của các tham số biến tần khác nhau như tốc độ, dòng điện và trạng thái lỗi.
Kết nối RS-232 có phần bị hạn chế vì chiều dài cáp mạng RS-232 tối đa là 50 feet. Ngoài ra, giao diện RS-232 là một-một, cho phép kết nối một biến tần với một bộ điều khiển. Cáp mạng RS-485 có thể kéo dài tới 4000 feet và cho phép kết nối nhiều thiết bị. Tuy nhiên, có thể cần thêm bộ điều hợp để tạo loại kết nối này.
Giao diện Ethernet cung cấp một liên kết hiệu suất cao, chi phí thấp giữa hệ thống điều khiển và nhiều biến tần. Một số giao diện Ethernet VFD thậm chí có sẵn với một máy chủ Web cho phép người dùng cấu hình và điều khiển biến tần từ bất kỳ trình duyệt Web nào. Các giao thức Ethernet như Modbus TCP / IP và EtherNet / IP thực hiện dự đoán kiểm soát biến tần qua Ethernet và giúp thiết lập dễ dàng cho người dùng không sử dụng CNTT.
9.Đừng bỏ qua quá trình cài đặt và yêu cầu hoạt động
Biến tần tạo ra một lượng nhiệt đáng kể. Nhiệt độ này có thể làm cho nhiệt độ bên trong của vỏ bọc vượt quá mức nhiệt của VFD. Việc thông gió hoặc làm mát có thể cần thiết để giữ nhiệt độ bao quanh trong giới hạn quy định. Đo nhiệt độ và tính toán nhiệt độ xung quanh cũng phải được thực hiện để xác định nhiệt độ dự kiến tối đa.
Các biện pháp phòng ngừa hoạt động cũng phải được xem xét. Người ta nên tránh chạy một động cơ cảm ứng tiêu chuẩn ở tốc độ thấp trong một thời gian dài, vì điều này có thể làm cho nhiệt độ động cơ vượt quá đánh giá của nó do luồng khí giới hạn được tạo ra bởi quạt của động cơ.
Khi động cơ tiêu chuẩn hoạt động ở tốc độ thấp, tải trọng đầu ra phải giảm. Nếu mô-men xoắn đầu ra 100% được mong muốn ở tốc độ thấp, có thể cần phải sử dụng động cơ định mức công suất biến tần.
Không sử dụng công tắc contactor hoặc ngắt kết nối để điều khiển chạy / dừng của biến tần và motor: điều này làm giảm tuổi thọ biến tần. Thiết bị chuyển mạch điện đầu vào trong khi VFD đang hoạt động chỉ nên thực hiện trong các tình huống khẩn cấp.
10.Cẩn thận với chỉnh lưu
Bất kỳ tải phi tuyến tính nào, bao gồm bất kỳ thứ gì có bộ chỉnh lưu, tạo ra sóng hài - bao gồm VFD. Nếu quá mức, sóng hài có thể làm quá nhiệt và làm hỏng thiết bị, máy biến áp và thậm chí cả dây dẫn phân phối điện.
Hai loại bộ lọc có thể giảm thiểu các sóng hài kết hợp với biến tần. Bộ lọc hài hòa thụ động bao gồm dòng cảm ứng AC và cuộn cảm. Dòng cảm ứng và cuộn cảm làm giảm các sóng hài liên quan đến biến tần, và được khuyến khích cho mọi cài đặt. Chúng cũng bảo vệ VFD khỏi quá áp quá mức, thường do chuyển mạch tụ điện tiện ích gây ra. Các bộ lọc chủ động lấy mẫu dạng sóng hiện tại, đảo ngược nó và cho dạng sóng đảo ngược trở lại đường thẳng để chống lại sóng hài. Một số bộ lọc hoạt động cũng có các mạch phanh động cho phép giảm tốc động cơ để đặt dòng điện tái sinh trở lại trên đường cung cấp ac.
Đầu ra, hoặc tải, dòng cảm ứng bảo vệ động cơ và cách điện cáp do ngắn mạch VFD và tổn thương sóng phản chiếu lưỡng cực cổng (IGBT) cách điện. Chúng cũng cho phép động cơ chạy mát hơn bằng cách làm mịn dạng sóng hiện tại. Dòng cảm ứng đầu ra được khuyến khích cho các động cơ hoạt động không biến tần và dây dẫn động cơ VFD vượt quá 75 feet.
